�r�g��2020-09-20 19:49��Դ����(zh��n)�g�������g ���ߣ��Ї�ͨ��
|
ժҪ��ᘌ��o�˙C�ɲ�Ӱ���Ŀ�˙z�y���}���о�һ�N���ں��x�^(q��)��ğo�˙C�ɲ�Ӱ��Ŀ�˙z�y���g�����ȇ��@�o�˙CӰ�����c�������˻��ں��x�^(q��)���Ŀ�˙z�y���g�ă�(y��u)�ݡ�Ȼ���B��ԓ���g���P�I���E���w�{�˸����E�������㷨����Y�˃ɷN�^�����ĺ��x�^(q��)��Ŀ�˙z�y���:����DPM�ĺ��x�^(q��)��Ŀ�˙z�y��ܺͻ��ھ��e��(j��ng)�W(w��ng)�j�ĺ��x�^(q��)��Ŀ�˙z�y��ܣ�ͨ�^���F(xi��n)���㷨�ķ���������һ�����M�㷨�ṩ��˼·��
����ڂ��y(t��ng)��(zh��n)���ɲ췽ʽ���o�˙C�ɲ��܉��ڱ����ˆT��������r���ṩ�����r�������Ϣ����u�ɞ�һ�N�����Ăɲ��ֶΡ��o�˙C�@�Ñ�(zh��n)���ɲ�Ӱ��(sh��)��(j��)��ͨ�^Ŀ�˙z�y���g̎��ɲ�Ӱ���F(xi��n)����(zh��n)������Ŀ�˵Ķ�λ�c�������(j��)�z�y��Ϣ�����Ԝʴ_�������Ŀ�ˡ����Ք��Ҳ���������(zh��n)���Д������������(zh��n)Ч�ʡ�
Ŀ�˙z�y���g��һ�N����Ŀ�ˎ��c�y(t��ng)Ӌ�����ĈD���R�e�ָ�g�����ڵ��㷨�Ў������������������ȣ���Ҫ���Î��g��Ϣ��λ���\��Ŀ�˵Ŀ��gλ�ã����漰��Ŀ��e�����ܷ������Ŀ�����x߀Ҫ����Ŀ���R�eģ�K���^�̷������ࡣ���⣬�o�˙C�ɲ�Ӱ��������һ���о���Ŀ�˙z�yӰ���������������ԣ�
��1������h(hu��n)�����ӡ�Ŀ�˱����\���ҏ��s��
��2��Ŀ�����������^С����λ���y��
��3��Ŀ�����������@���R�e�y�ȴ�
��4�����H���������㷨���r�ԡ�������Ҫ��ߡ�
��ˣ������������M�Пo�˙C�ɲ�Ӱ��Ŀ�˙z�y�ɞ�o�˙C��Ϣ̎�����P�I�������ں��x�^(q��)��Region Proposal����Ŀ�˙z�y���g����������Ҫ��
(1�����η���Ύ�Ӱ���M�Йz�y�������\�ӱ������ƣ�
��2�����x�^(q��)��z�y���sС��Ӌ�㴰�ڔ�(sh��)�����\���ٶȿ죻
��3��������ȡ���S�c�������Y�ϣ��R�e��λ�ľ����c�ٶȸߣ�
��4�����w��ܺ���������D1��ʾ�����Ը���(j��)�z�yҪ���x�^(q��)��z�y��������ȡ������������z�y�A���M��׃���������㷨�ĸ��M�c�u����
��ˌ����ں��x�^(q��)��ğo�˙C�ɲ�Ӱ��Ŀ�˙z�y���g�M���о�������Ҫ���x�����팢���������A���M�н�B���㷨������
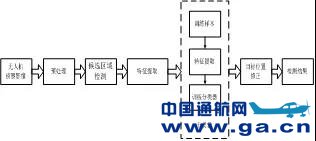 �D1 ���ں��x�^(q��)���Ŀ�˙z�y���
1 ���x�^(q��)��z�y
���x�^(q��)��z�y�����ÈD���ɫ��߅�����y�����������x��������Ŀ��λ�õķ���������Ŀ�˿��ܳ��F(xi��n)�ڈD����κ�λ�ã���С���L�����������������Ҫ����(j��)һ���������D��ָ�ɸ��N�ߴ���ӈD��������x�^(q��)����Ŀ�˶�λ�c������ȡ��
����Ч�ķָ���x�^(q��)��ɞ���x�^(q��)��z�y�A�ε��о����c�����y(t��ng)�F�e������Exhaustive Search���㷨Ҳ��������һ�N����ĺ��x�^(q��)��z�y�����������ÎN�ߴ������̶��ľ��δ��ڣ������л��S�C�������D���ȡ�ӈD���F(xi��n)���D��ı�v���@�NäĿ�F�e�ą^(q��)�����������r���L���������Ӱ����wĿ�˙z�y�㷨���\���ٶ��c���ܣ����o���M��o�˙C���̎���Č��r�ԣ���˞���ߙz�yЧ����Ҫһ�N�z�y���Ԍ��^(q��)�������M��������������s���\�㡣
�F(xi��n)�еĿ����ں��x�^(q��)��z�y���㷨�кܶ࣬Jan Hosang�Ȍ��@Щ�㷨�֞�ֽM�^(q��)���x��Grouping proposal methods���ʹ����u�օ^(q��)���x��Window scoring proposal methods���ɴ���ֽM�^(q��)���x���D���ȷָ��С�K���S����ij�Nԭ�t�M�ϳ���Ҫ�ĺ��x�^(q��)����(j��)�a(ch��n)�����x�^(q��)��ʽ�IJ�ͬ���ֽM�^(q��)���x���ּ��֞鳬���ط���Superpixels, SP�������طָ��Graph Cut, GC����߅��݆������Edge Contours, EC���������u�օ^(q��)���x���ڈD���Ͻ�ȡ�����ą^(q��)��Windows�����������cĿ���Pϵ�Ĵ�С�M�д�֣��x��֔�(sh��)�ߵ����ɺ��x�^(q��)�D2Ԕ���������@�N��Ӵβ����e����Ҫ�㷨��
 �D2 ��Ҫ���x�^(q��)��z�y�㷨���
�����㷨�б��^���д����Ե��У�Seletive Search��Edge Boxes��MCG��
Seletive Search����Ҫ˼·��ʹ�ÈD��ָ��㷨���D��ָ��С�^(q��)��Ӌ������С�^(q��)����ɫ���y�������������ƶȣ����ں����ƶ���ߵăɂ��^(q��)���؏����ƶ�Ӌ����ں��^��ֱ���ϳ������D�ϳ��^���Юa(ch��n)���ĸ��N�߶ȅ^(q��)����x�^(q��)��
Edge Boxes����ʹ�ýY��������߅���z�y�㷨�õ�߅���D��Edge Probability map�������÷ǘO��ֵ���ƣ�Non-maximum Suppression, NMS��ϡ��߅���D��Ȼ��߅���c�M��߅���M��Edge Group����Ӌ��M�g�����ƶȣ��M���õ����(n��i)���c��߅���دB�ăɽM݆����(sh��)��������(j��)݆����(sh��)���^(q��)����M�д�֣�����(j��)�֔�(sh��)�_�����x�^(q��)��
MCG�cEdge Boxesһ�����ýY��������߅���z�y�㷨�õ�߅���D�����÷�ˮ�X�㷨�õ�݆���D���S�����ɳ�����݆��ӳ��D��UCM����֮��ͨ�^�Ӵηָ�õ��^(q��)�����S�Cɭ�����������(j��)�߶ȡ�λ�ú�߅�����ȵ��������^(q��)���M�������M���x������Ҫ��ĺ��x�^(q��)��
�����ԣ�Robust�������r�Ժ��ٻ��ʣ�Recall�����u�r���x�^(q��)���x����һ��˜ʡ��o�˙C�ɲ�h(hu��n)�����s���³����^���п��ܴ��ڸ��N�_�ӣ�������õ������Ժ��^�ߵ��ٻ����DZ��C�^(q��)���x���㷨�ڌ��H�����о߂���|(zh��)��Ŀ�˙z�yЧ�����P�I��ͬ�r�����^(q��)���x���A�ε��\���ٶȣ�Ҳ���������wĿ�˙z�y�^�̵ĕr�ġ�
|