�r�g��2020-08-08 15:52��Դ���o�˙C��Ⱥ ���ߣ��Ї�ͨ��
|
��������o�˙C��Ⱥ���g�����������lչ����Ч��Q�ˆ��o�˙C���I�r�d�������^С����Ϣ��֪̎�����������^���IJ��㡣�o�˙C��Ⱥ���g���о��c�����ѳɞ�o�˙C���g�lչ��һ����Ҫ���o�˙C��Ⱥ������ͨ�^�ΙC�g�����Ѕf���� ��Ч�����d����������Ϣ̎�����������ҟo�˙C��Ⱥ���кܸߵ�“����”�����ͺ��������ԡ�������Ҫ��B�˟o�˙C��Ⱥ���g�����P���������o�˙C��Ⱥ���g�о��F���Լ��o�˙C��Ⱥ�lչ���P�I���g��δ��o�˙C��Ⱥ���g�lչڅ�ݣ����_չ�o�˙C��Ⱥ���о��ṩ��Փ���A��
0 ����
��Ⱥ����Դ������W�о�������Ȼ���У��W��BȺ����Ⱥ����Ⱥ��ρȺ����Ⱥ����Ⱥ�ȴ������w�ۼ��r�����܉��γɅf�{һ�¡������ļ�Ⱥ�\�ӈ�������������W��Pierre Paul Grasse���ڰ�ρ�����О飬�״���������OȺ�ĸ�����_ʼ�����ܼ�Ⱥ���о����������OȺ�О���D1��ʾ��
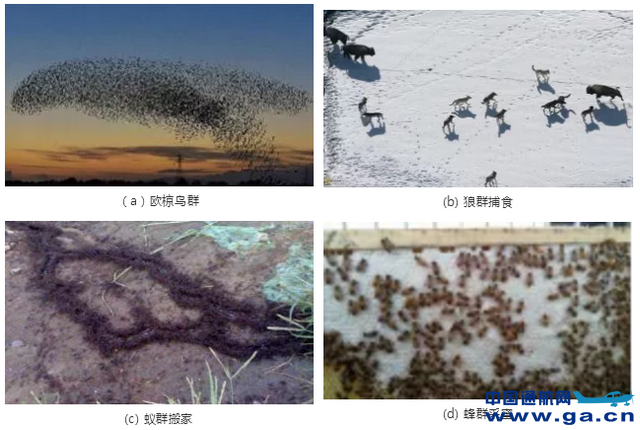 �D1 �������OȺ�О�
Fig. 1 Typical biological swarm behavior
�Οo�˙C�đ��ã�����������l�������ƣ��挦���íh����������s�Լ��΄ն��ӣ��H�@���ޡ���܊�����ϣ��ΙC����������ȼ�ϡ��|���ͳߴ�����ƣ��o���γɳ��m�����Ĵ�����ȣ��������ϣ����d���������C�d�������Լ�ͨ���O������ƣ��μܟo�˙C���ܺܺõ�����r��ֲ�����y�L�����U�Ȟĵ��΄գ��ھ��ð����ϣ��μܟo�˙CҲ���������������ό����΄�ʧ���ȡ����Q�Οo�˙C���õľ����ԣ�������܊�ƌW�ί�T�����δ��o�˙C�đ��Ì����Լ�Ⱥ�ķ�ʽ��
�o�˙C��Ⱥ��ָ��һ��������ͬ�o�˙C�M�ɣ�������Ϣ�����c�����������c푑������F��g�О�fͬ���m���ӑB�h������ͬ����ض��΄յ�����ʽ��������ϵ�y��
�o�˙C��Ⱥ���Ƕ��o�˙C�g�ĺ��ξ�ꠣ�����ͨ�^��Ҫ�Ŀ��Ʋ���ʹ֮�a����Ⱥ�fͬЧ�����Ķ��߂���Џ��s��׃��Σ�U�΄յ�������δ�����o�˙C��Ⱥ�fͬ����΄Ռ��ɞ�o�˙C�a�I���õ���Ҫ���档�o�˙C��Ⱥ��������ȵذl�]�o�˙C�ă��ݣ�������w���d����������Ϣ��֪̎�����������ܱ���Οo�˙C�����΄Օr���������΄�Ч�ʲ��ߵĆ��}��
1 ���ȟo�˙C��Ⱥ���g�о��F��
�o�˙C�ѱ������V�����ڇ������O�������I���S���o�˙C���g�������о����o�˙C������Ⱥϵ�y�܉�ͨ�^�o�ܵąf����ɸ��N���s��׃���΄գ����Ҿ߂�Խ�ąf�{�ԡ������Ժ������ԣ��ѳɞ�o�˙C�о���һ����Ҫ���o�˙C��Ⱥ������ָһ�M�߂䲿�����������ğo�˙Cͨ�^���P���o��������������ָ�]ϵ�y�O���£���������΄յ��^�̡������������ڡ��o�˙Cϵ�y·���D2005-2030����ָ������2025�꣬��Ⱥ�o�˙C���߂�����J֪�������܉F��ȫ�ԽM������
1.1 ����o�˙C��Ⱥ���g�о��F��
1.1.1 �o�˙C��Ⱥ�ӿ����о��F��
���o�˙C��Ⱥ��ʩ��Ч�Ŀ�������ɸ��N���s��Ⱥ�΄յĻ��A��Cook W.J.�����J�飬�o�˙C��Ⱥ�΄�Ҏ�����}���ڏ��s���}�ĽM�σ������M���\�I�W�Ƕȣ����÷ӿ��Ʒ�����Q����}��Boskovic J.D.���ˌ��o�˙C��Ⱥ�΄�Ҏ�����}�ֽ��Q�ߌӡ�·��Ҏ���ӡ�܉�E���ɌӺͿ��ƌӣ����У��Q�ߌ�ؓ؟�o�˙C��Ⱥϵ�y�е��΄�Ҏ���c���䡢�������΄��u���ȣ�·��Ҏ����ؓ؟���΄՛Q�ߔ����D�Q�ɺ�·�c���������o�˙C����΄ա�Ҏ���ϵK��܉�E���ɌӸ����o�˙C�ˑB��Ϣ���h����֪��Ϣ���ɟo�˙Cͨ�^��·�c�Ŀ��w·�������ƌӿ��Ɵo�˙C�������ɵ�܉�E�w�С��o�˙C��Ⱥ�΄�Ҏ���ӽY����D2��ʾ��
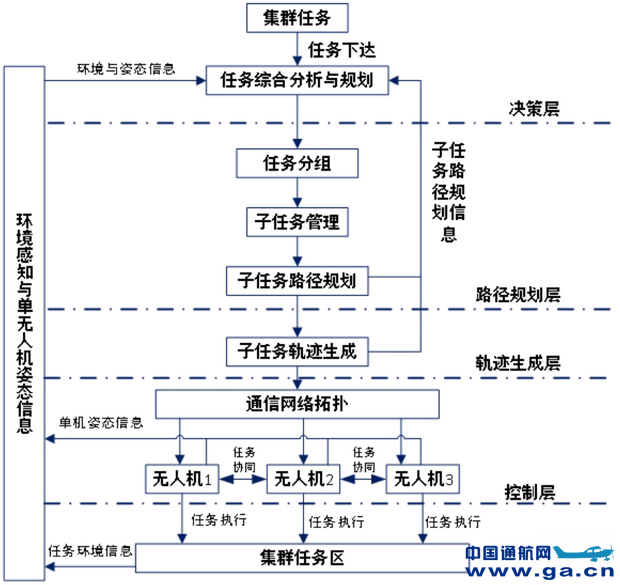 �D2 �o�˙C��Ⱥ�΄�Ҏ���ӽY��ʾ��D.
Fig.2 Hierarchical structure of UAV swarm mission planning
Tsourdos A�ȏĶ��o�˙C�΄Յfͬ·��Ҏ���ķ����C�fͬ�΄�Ҏ���֞鼯Ⱥ�΄�Ҏ������ӡ��fͬ·��Ҏ���ӡ����ƌӵ������Ӵ�[13]���о��������ӿ����܉͟o�˙C��Ⱥ���΄շ��䆖�}�ď��s�ԣ����Ⱥ�΄շ���Ч�ʡ�
1.1.2 �o�˙C��Ⱥ����ϵ�y�о��F��
������Ⱥ����ϵ�y���Пo�������Ĺ��c���֞鼯��ʽ�����c�ֲ�ʽ����ϵ�y������ʽ����ϵ�y���ɿ������Ĺ��c���ϵ�y���΄�Ҏ���ͅfͬ���������Cϵ�y�еğo�˙Cֻ�����΄յĈ����ߡ�Ŀǰ�����ж�N����ʽ�΄�Ҏ�����о���������������̆��}��܇�v·�Ɇ��}���W�j��ģ�͡������������Ҏ���ȡ����оW�j��ģ�͡������������Ҏ�������ڽ�Q���΄Օrʹ�á�
�ֲ�ʽ����ϵ�y�Л]�п������Ĺ��c�����ΙC���f��ϵ�y�е�λ��ƽ�ȵģ����������������f�̵ķ�ʽ����΄ա���W����Ϣ������gӋ����IST���_չ�Į����o�˙C��Ⱥ���r�fͬ�c�����Ŀ��COMETS�����õľ��Ǯ����o�˙C��Ⱥ�ֲ�ʽ���r���Ƽ��g��
1.1.3 �o�˙C��Ⱥ�΄Յfͬ�㷨�о��F��
|