�r�g��2020-07-12 11:47��Դ���o�˙C֮�� ���ߣ��Ї�ͨ��
|
������Ԓ�f���pȭ�y�����֣��Ýh�ܲ�סȺ�ǡ��@��Ԓ���H����������硢���������m�ã��Ƽ��lչ�Ľ�����@�����Z�������ܙC���I��Ҳͬ���m�á����^�����H�Ժ����������ա��ăɲ��ƻ��Ӱ�����ё�ԓ��ӛ�ã�������F�ğo�˙C��Ⱥ������R�^���Ǖr���Ų����˿����@�ӵ��R�^�����@�@���ѣ����l���@�ӵĸЇ@?“ԭ��o�˙CҲ����һȺ�۷�һ�ӣ���⧲������r����l��”�����������҂��ճ������Іμ�������ֻ����������Ƭ��ҕ�l����׃�ø����ǻۣ��и��ߵđ��Ãrֵ��
�����o�˙C��Ⱥ���𣬏��Ӱ���M���������Щ�ſ���Ӱ�R�^����߀�и����С�U�ă�����Ҫ�҂�ȥ�˽⡣
�����o�˙C��Ⱥ����
���������a�ɱ�����ʹ��Ч��
�����o�˙C��Ⱥϵ�yһ���ɲ�ͬ��ƽ�_���F�ߵͻ���Ⱥ��ʹ�ô�����ɢ�ĵͳɱ�ϵ�y�γɹ��ܻ��a��ᘌ���ͬ���΄�Ŀ�ˣ���ͨ�^�{������ĸ��͟o�˙C�Ĕ��������m������ȥ���_�l���Ï��sϵ�y�O��ijɱ�����܊���I���У�����ڂ��y����ϵ�y���o�˙C��Ⱥ�ĉ��������M�õ͡�����һö“�~��”����120�f��Ԫ�ijɱ�����ُ�I80��“����”�o�˙C���Ҳ���Ҫ�L�r�g���۵ľS�ޱ��B�M�á��o�˙C��Ⱥһ�������̻����a�ɱ��ͣ��M�b�ٶȿ죬��һ������Կ������Ĕ������Ռ�������Ч�ݚ��������_�ȸ߃rֵ�b�䣬���зnj��Q�ijɱ����ݡ�
�����ֲ�ʽ��Ⱥ�ǻ�
������Ⱥ�д����ĽK��ƽ�_�Ɍ��F�ֲ�ʽͶƱ�Խ�Q���}����Ⱥ���I��ÿһ���K�˵õ�����Ϣ������ͬ�������ěQ�߿����廨���T�����@�N��r�£�����Ⱥ�еěQ���M�ЅR����ͶƱ�������@����߽Y�������_�ԣ������S�C�`�
�����ֲ�ʽ̽�y
�����o�˙C��Ⱥ���з�ɢ�ȸߣ��ֲ���֪��������ȫ�ָ�֪�����������c����������ܰѼ�Ⱥ�е�ÿһ���K�˵�̽�y��Ϣ�R���ںϣ����Ԍ��Fȫ����Ϣ�ĸ�Ч�@ȡ��
�������ߵĿɿ���
�����o�˙C��Ⱥ�ķֲ�ʽ���ԛQ���ˮ���Ⱥ�еIJ����O����Ϻ������o�˙C����Ѹ������Ҏ���΄գ����a��ȱ���Ķ�����A����ȫ��Ŀ�˻��Ŀ�ˡ�������y���͏��s����ϵ�y�ĵ�����ȱ�ݡ��܉�O�������Єӵijɹ��ʡ�
�������^�����������ܶ��o�˙C�ۺ��ߣ������Dz����څȺ�����“�o�˙C���ܼ�Ⱥ̫�����ˣ���Ҫ�ú��о��о���”�����DŽe����Ŷ!��Ҫ���o�˙C��Ⱥ����������о�߀Ҫ���������P�I���g������!
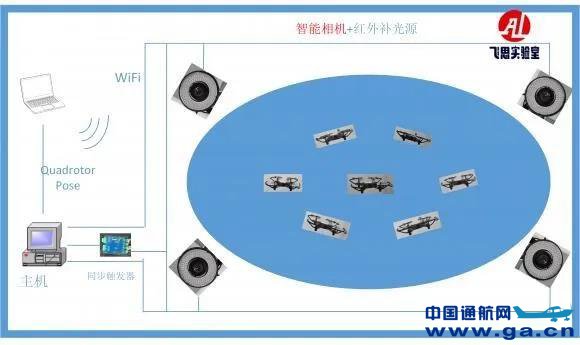
�����o�˙C��Ⱥ���g����
������Ⱥ�����㷨
�������o���w����ϵ�yҪ���F��g�ąfͬ�ͱ�횴_���o���w����֮�g߉�Ϻ������ϵ���Ϣ�Pϵ�Ϳ����Pϵ��ᘌ��@Щ���}���M�е��wϵ�Y���о����Ԍ����o���w����ϵ�y�ĽY���Ϳ������w�����ؽY�����������C���o���w����ϵ�y����Ϣ���Ϳ������ĕ�ͨ����o���w����֮�g�Ľ����ṩ��ܡ���Ⱥ�����㷨���HҪ���C���o���w����֮�g����Ч���M�Ѕfͬ�����Ҳ���ه�ڟo���w�����Ĕ��������o���w���������S�r�˳������뼯Ⱥ��������Ӱ푿���ϵ�y�����w�Y����
����ͨ�žW�j�OӋ
�����ڶ��o���w�����fͬ�΄��ԽM��ϵ�y�У��o���w��������ͨ�žW�j���c������g�ķֲ��Q���˾W�j���ؓ�Y��������ͬ�ľW�j�ؓ�Y��������ͬ��ͨ�����ܡ���һ����ͨ���ؓ估�����£����������е��΄շ���ͨ���YԴ�����ͨ���|�����Ǽ�Ⱥ���g���y�}֮һ��
���������㷨�cͨӍ���g�����
�������o���w����������߅fͬ����΄յ�Ч�ܣ���Ҫ�M����Ϣ����������ʹ������������Ϣ���r�������M�Ђ�ݔ������ͨ�žW�j������һ����Ҫ����ͨ���|���s���ąfͬ���Ʒ����������ڮ�ǰ��ͨ�ŷ����|���s���£��OӋ���o���w�����fͬ���Ʒ�����ʹ�����@�N���Ʒ����£����o���w�������\�ӼȝM���΄������ֿ���ʹ�ö��o���w���������ͨ�žW�j���ܣ��M����Ϣ���r������ݔ�������M����߶��o���w�����fͬ����΄յ�Ч�ܡ�
�����΄�Ҏ�����g
�������ˌ��F���o���w����֮�g��Ч���΄Յfͬ��ͬ�r���C���ƽY������ه�ڟo���w�����Ĕ������������o���w�����fͬ�΄��ԽM��ϵ�y�ֲ�ʽ�wϵ�Y�������o���w�����Ļ����О�ͺ����΄��ɟo���w�����Լ�������ɣ������R���s�΄պ���Ҫ�f�����΄Օr����ǰ�o���w���������΄���Ϣ���YԴ����l�����ɸ��o���w�����M�ɵľW�j�ϣ����o���w�������Ը���������ǰ�΄պ��YԴ��r����푑���
�����@�ӣ�����һ���o���w�������˳�����룬��������ϵ�y�M���Y������Ӱ푡�
����·��Ҏ�����g
�����o�˙C�ڌ��H�w�����������ͻ�l��r������M�к��E����Ҏ��������Ҏ�����{����M��fͬ�����r�ĕrЧ�ԣ�����Ҏ�������õ��㷨��횾��Ќ��r����Ч�����c����ˣ����Ը�����Ⱥ�㷨�I�����������c���ԅ������E��ͻ�l���{�����I�亽�E�����S��H�څ������E��ͻ�l���{���M���I��������������Ҫ�����l���E�M���������ɴ˿��Կ��٫@���������E�Σ�����Qԭͻ�l���{���E�Σ������w���^���У��o�˙C�����@�õ����{��Ϣ�����������������E��ֱ���_��Ŀ�˹��c��
��������Ƽ��g
�����ڔ��W�ϣ�����һ�����g���x�ğo�˙C��Ⱥ���Կ���һ�����AȺϵ�y�r׃��꠆��}������Ɔ��}���������ԣ���ͨӍ�r�ӵĴ����֞龎꠷����������y�ȡ�
 �����˽���o�˙C��Ⱥ��Ҫ���Ղ��P�I���g���Dz���һ�r����������“��ԓ�ĺ�������”?�䌍��������@�ӵĆ��}���ܶ���I�ѽ����ڟo�˙C���ܼ�Ⱥ�_�l���̌W�о�����ƽ�_���o�˙C��Ⱥ�о����Ӻ��Ρ�ֻ���҂����������й������ڑ���ƽ�_�����Mһ�����_�l�µ��㷨���о��ͺ��ˡ�ԓ���м�Ⱥ����ƽ�_֧�֟o�˙C���C������㷨�OӋ�c���F���eᘌ��������ᵽ�ġ���Ⱥ�����㷨��ͨ�žW�j�OӋ���΄�Ҏ�����g��·��Ҏ�����g������Ƽ��g������Ϣ��֪���g�������ںϼ��g��̓�M/������C���ƽ�_���g�ȟo�˙C���C����P�I���g�M���о��̌W��߀���_չ���ͨ��ԭ������Ⱥ�㷨���o�˙C��Ⱥ�����\�õȌ��`�̌W��
|