�r�g��2017-05-28 20:39��Դ��36�(����) ���ߣ��Ї�ͨ��
|
�o�˙C�İlչ��̎���L�ڣ��Ј��r��Ҳ���Ǻ��F���ғ���һ�ܣ������������ҵĹ�������һЩ�|���������ģ���ҪՄ�����ǎ����Ă��������b���͟o�˙C�������ǿƌW���Á��о����׃���҃r���F�Ĵ��͟o�˙C�� ��ȴ��͟o�˙C��С�͟o�˙C�����������Ƿ��㡣�쾚�IJ����߿���ʹ�������ⷽ���w�У��Ķ����õ؝M���Ĕz��Ҫ����ô���o�˙C���w��ԭ����ʲô�� ��ֱ�\�� �o�˙C�������팍�Fǰ�M��ֹͣ��������������ζ�������Ƅӿ՚�r���՚�Ҳ�������Ƅ��������@�ǟo�˙C�܉��������µĻ���ԭ�����M�����������D��Խ�죬������Խ��֮��Ȼ�� �F�ڵğo�˙C�܉����������飺��ͣ�������ͽ��͡�����ͣ�r���o�˙C�Ă������a���������������µ��������@�dz��������⡣��ô��Ό��F�����������Ă������������Ķ��a��һ���������������ϵ�������ԓ�������֮�o�˙C���������������p�٣�������ʹ���^�m�����w�У���ô�Ա�횱��C���ϵ���Ҫ�������µ�����ʹ�o�˙C���͵�Ҫ��t�෴����Ҫ�p�������������ٶȣ��˕r�������¡� ���D ���ʹһ�����ڳ����w�ğo�˙C���^�����w���˕r�������\��ԭ������ʲô��
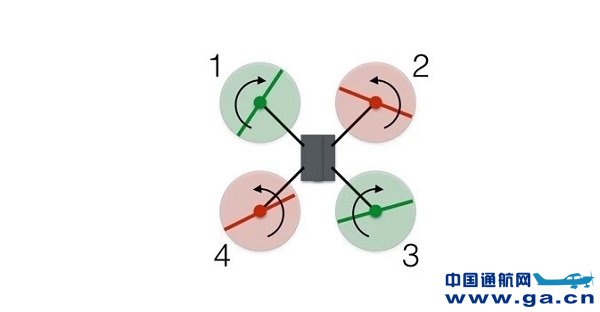
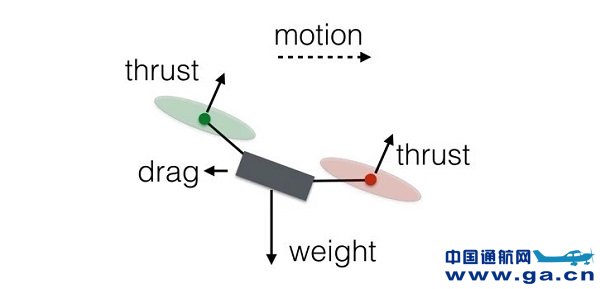
��D��ʾ���tɫ����������r����D���Gɫ��������형r����D�����@�ɽM�������෴�������D�r���o�˙C�Ŀ��������㡣�DŽ���ֵ�c���Ԅ���ֵ�������ý��ٶȳˑT�Ծ�Ӌ��ó��������f���DŽ���ȡ�Q���������D���ٶȡ� ���O�tɫ������һ��ֵ�����ĽDŽ��������Gɫ������һ��ֵ��ؓ�ĽDŽ�����ÿ��������ֵ�֞�+2��+2��-2��-2����ô�˕r���е�����������㡣�o�˙C���܌��F��ͣ�� ��Ҫʹ�o�˙C�����D���t��Ҫ��������1�Ľ��ٶȡ����ǣ��mȻ��������1������ȱʧ��ʹ�o�˙C��׃�\�ӷ����c��ͬ�r���ϵ������������µ����������ԟo�˙C���½�����ô�����ʹ�o�˙C�ڸ�׃����r���ָ߶Ȳ�׃�� ��������1��3���D�ٶȵ�ͬ�r����������2��4�����D�ٶȡ��˕r�����ĽDŽ�����Ȼ�����㣬���ԟo�˙C�܉����D����������Ȼ�����������t�o�˙C�܉���ͬһ�߶ȡ�������ͬһ�������D�������Ǟ錦�ǣ����ԟo�˙C��Ȼ���Ա���ƽ�⡣ ��ǰ�w�к͂����w�� �o�˙C��ǰ�������\��ԭ����ʲô�^�e���䌍�]�У����o�˙C�nj��Q�ġ��@ͬ���m���ڂ����\�ӡ�һ����݆�o�˙C����һ�vÿһ�涼�����������܇�������������ǰҲ�ͽ�������������ɂ��ƄӵĆ��}�� ��ô���wԓ��β�����
|