�r�g��2020-06-24 17:13��Դ���o�˙C ���ߣ��Ї�ͨ��
|
���r���������ɶ�λ�ˣ�����Ӌ��C�������ĈD���M��̎�������r�ؽ�����\�����w�������ɶ�λ�ˣ��������ɶ�λ�ã�X,Y, Z���ˣ��������ɶ��ˑB�������ǣ�ƫ���Ǻ͝L�D�ǣ���ԓϵ�yҲ���ԷQ��“�҃ȶ�λϵ�y”��“�҃�GPS”�� ��D10��������C֧�֣����w�����V����W�҃ȶ�λϵ�y�����������C����������D�����˂������C����ͬ���C��Ŀ���a����ͬ�ĸ��w���������CԽ�࣬���w����Խ�� 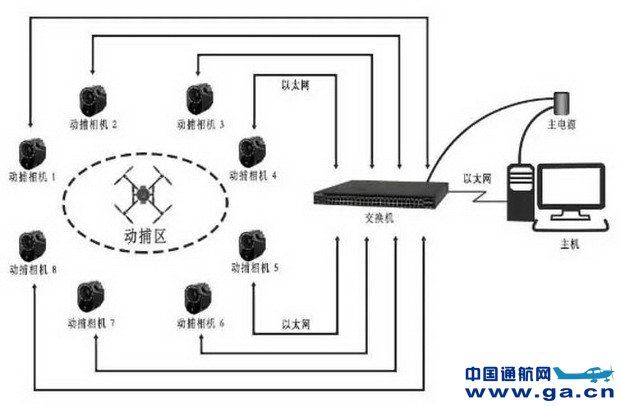 �D10 ��W�Ӳ�ϵ�yԭ��D
  �D11 ��W�Ӳ����C
 �D12 T�͘˶��U�o���\�Ӳ�ϵ�y��У��
 �D13 L�͘˶�ֱ���o���\�Ӳ�ϵ�y�����c����
ܛ������
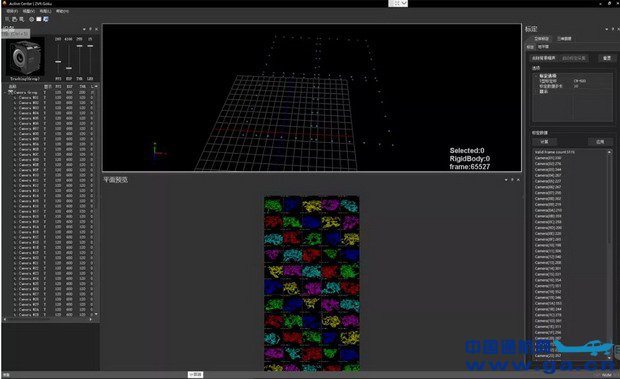 �D14 ��W�Ӳ�ϵ�yܛ������
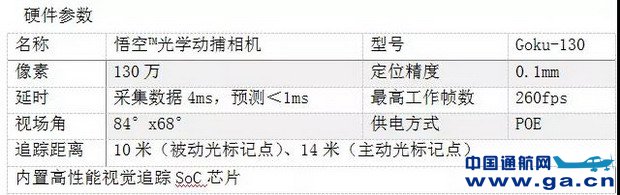
1�����A����
1��֧�����ĵĶ��Z�ԡ���ҕ�ǡ��ര��3D�@ʾ�������� 2����ͬ�r�����_�����_Goku™ Camera�M�м��й��� 3����ҕ�X�T��ͬ���������M�й��� 4����Ч���rҕ�X���S�ؽ����� 5����W�T������ں�����* 6�����_���ق����ܹ�W���w�������˶������� 7�����r���wۙ���㼰�L�� 8������ӛ䛼��ط� 9�����g���^�r�y�㼰�L�� 10�����H�I�ȵ�IK�㷨* 11�����r������ݔ�� 12������ӛ䛼��ط� *�H�ڑT��ϵ�y����r���� 2��֧�֔�����ʽ  3���S���ĵ������ӿ�
 4.1����ʡ�����WԺ
��ʡ�����WԺ��Massachusettes Institute of Technology��MIT����RAVEN(Real-Time Indoor Auto no mous Vehicle Tese Encironment)����ң��Ȳ��b��18�_�\�Ӳ��z��C�����Ԍ��F�o�˙C���҃ȶ�λ������҃�߀�ж��v�����ĵ���С܇���о�������Draganflyer V Ti Pro ������o�˙C�͟o��С܇�M�ɡ�MIT�ğo�˙C��Ⱥ��������Ӌ����UAV SWARM Health Management Project����Ҫ�о���ܟo�˙C���w����ʾ���D5����������o�˙C��Ŀ���M���B�m������ۙ���D16����C�fͬ�;�ꠌ�
 �D15 �o�˙CĿ��������ۙ��� �D16 ʮ�ܟo�˙C���C�fͬ
4.2��˹̹����W
˹̹����W��Stanford University����STARMAC��Stanford Testbed of Autonomous Rotorcraft for MultiAgent Control���Ŀ�Ǟ��˜yԇ����C���C�㷨�Ϳ��Ʋ��ԣ������������܉�ʹ��GPS��IMU�������M��܉�E��ۙ���������w������Hoffmann G M�F���˹̹����W��ԇ��_�����Ȍ�������o�˙C�ķǾ���ģ�;��Ի���Ȼ��ʹ��LQR���Ʒ����OӋ���ˑB��������ʹ�û�ģ���Ʒ����OӋ�˸߶ȿ���������ȡ�������õĿ���Ч����
4.3���eϦ���၆��W
�eϦ���၆��W��GRASP��General Robotics,Automation,Sensing and Perception������Ҍ��o�˙C�Ŀ����M���˴����о��������ڹ�W�Ӳ�ϵ�y��˟o�˙C�yԇƽ�_����Ҫ�о�������D17��ʾ����Ҫ�о����ݰ�����������o�˙C�Ľ�ģ��������o�˙C�����w�п����㷨�Ͷ�ܟo�˙C�fͬ�����㷨���о���ͨ�^������GRASP������ѽ�ȡ���˺ܶ����³ɹ�����ԓ�o�˙C�yԇƽ�_�£��o�˙C�w�F���ܴ�ęC���ԣ��܉���ɟo�˙C��Ⱥ���Eۙ���fͬ�����;���w�еȜyԇ���D18�������o�˙C�fͬ�w�С�
|