|
�Ͼ����պ����W(xu��)�����R��F(tu��n)�(du��)
“�{(l��n)��”̖(h��o)�����w�������m��(y��ng)���΄�(w��)����h(hu��n)����δ��(l��i)�����w�����İl(f��)չ�����Ъ�(d��)�صĶ��ģ�K���Ɍ�(sh��)�F(xi��n)ˮꑿ������w�С��Ե��Κ��w�����w������(g��u)�ͣ����ڶ�����ģ�K�w�У������Y(ji��)��݆��ʽ���ֺͷ����pץȡ���ԣ������w�С����С��L��(d��ng)�Լ�ץ��Ϣ�ȹ��ܣ������չ�˟o(w��)�˙C(j��)�ęC(j��)��(d��ng)�ԣ��m��(y��ng)�Ժ��΄�(w��)��Ԫ�ԡ�
���չ��I(y��)�鶼��˼֮�鸮�Ͱl(f��)�F(tu��n)�(du��)
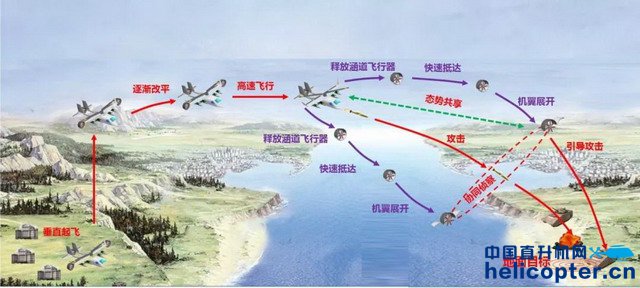
���������c�̶����ںϡ������L(f��ng)���c�w�����ںϼ��g(sh��)���Y(ji��)�ϽM��/���x�f(xi��)ͬ����(zh��n)˼��Ϳ�׃�μ��g(sh��)����(sh��)�F(xi��n)������ֱ/�̾����c��ͣ�������L(f��ng)�����M(j��n)����Ѳ���������ýM�����棬��ߺ��r(sh��)���̡�����b�d���������÷��x������˟o(w��)�˅f(xi��)ͬ�ֹ����������ʹ���`���Ժ�ʹ�Ø�ʽ����(zh��)�п������(b��o)���O(ji��n)ҕ�c�ɲ죬֧Ԯ���ϡ��ˆT/���Y�\(y��n)ݔ����(du��)�ع������΄�(w��)���M����܊δ��(l��i)��(zh��)���h(yu��n)���طN����(zh��n)�����з��֡��طN�\(y��n)ݔ����(zh��n)�ؾ��o(h��)���΄�(w��)����������
“�C��”׃��(g��u)�Ͷ�ģ�B(t��i)�o(w��)�˙C(j��)

�Ͼ����պ����W(xu��)���˵���F(tu��n)�(du��)
“�C��”�o(w��)�˙C(j��)��Ч�ؽY(ji��)����ֱ���C(j��)�̶����w�C(j��)�ă�(y��u)�c(di��n)��ͨ�^(gu��)���(d��ng)�������w�Р�B(t��i)�����m��(y��ng)׃����(l��i)����w�����ľC�����ܣ��Ķ���߃�(y��u)���Ĵ�ֱ�������c�����w���������܉�����D(zhu��n)�Q�^(gu��)�ɷ�(w��n)��ƽ�����ɿ��ԏ�(qi��ng)�����c(di��n)��ͬ�r(sh��)���(y��ng)�����혪�⇊���(q��)��(d��ng)���g(sh��)������p���뼼�g(sh��)����С������(d��ng)���ƣ��c�w�C(j��)�[���O(sh��)Ӌ(j��)���g(sh��)��������һ��ȫ�µġ������ܵ�׃��(g��u)�Ͷ�ģ�B(t��i)�o(w��)���w������
��ꎹ��W(xu��)ԺUAV LAB�F(tu��n)�(du��)
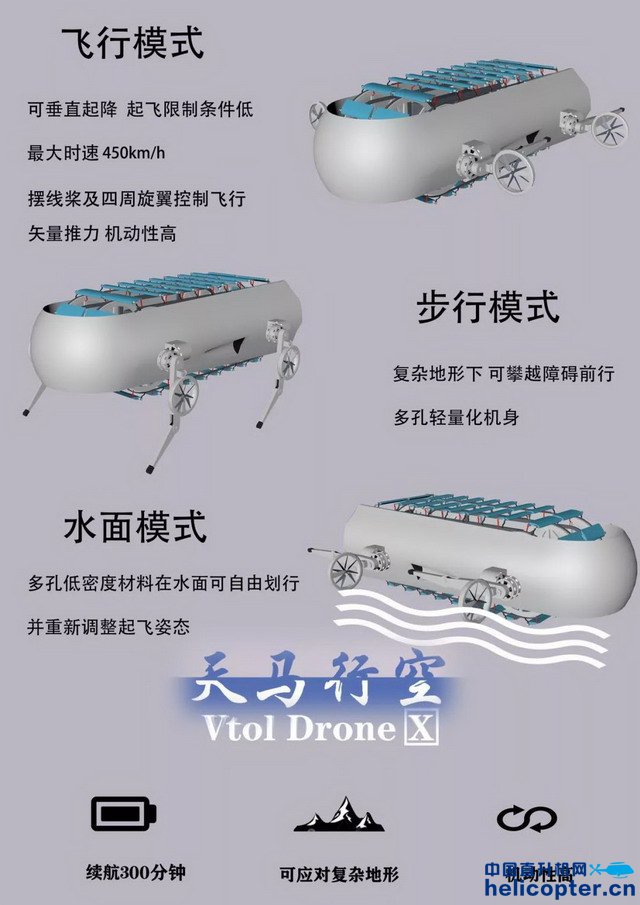
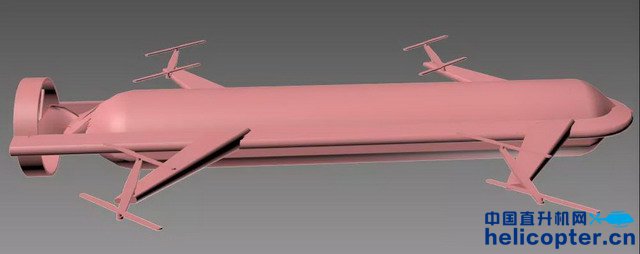
“���R�п�”�o(w��)���w�������д�ֱ���Լ������w�л������ܣ�߀���е������ߣ�ˮ�л��й��ܡ������C(j��)�w��ܡ������������������L(f��ng)�١����ߙC(j��)��(g��u)�������⚤�����Ҫ�Y(ji��)��(g��u)�����Ô[����ʽ��׃�������������w���������������������p�������������P(gu��n)��(ji��)�o(w��)ˢ늙C(j��)���ߙC(j��)��(g��u)��ͨ�^(gu��)�������߱ۺͺ����L(f��ng)���{(di��o)��(ji��)�����Լ��w���ˑB(t��i)�����в�ͬ���|(zh��)�µĸ�Ч���M(j��n)���������д��d�ɡ����ٶȡ��ߙC(j��)��(d��ng)�������(d��ng)�����ԣ����挦(du��)��(f��)�s���ӭh(hu��n)���ĺ�ꑿ�����������
��(chu��ng)���_(d��)�˪�(ji��ng)
����(d��ng)������ֱ���C(j��)
| 

 2002-2021 www.muluu.cn �����{(l��n)���w�з��g��˾���(qu��n)���� �����{(l��n)���w�з��g��˾���(qu��n)��
2002-2021 www.muluu.cn �����{(l��n)���w�з��g��˾���(qu��n)���� �����{(l��n)���w�з��g��˾���(qu��n)��